 English
English 简体中文
简体中文
















从玻璃钢盐酸罐缠绕原理出发,介绍了玻璃钢盐酸罐缠绕控制系统的设计,针对小车伺服系统提出了一种采用模糊PID控制的方法,仿真结果表明,采用这种控制器后,伺服系统的性能有显著提高。同时针对玻璃钢盐酸罐缠绕的特点,提出了一种自校正方法用于控制小车,结果显示该方法使得玻璃钢盐酸罐缠绕的工艺有很大的提高。
玻璃钢盐酸罐缠绕系统是生产玻璃钢盐酸罐储罐及管道的设备。我国现有的缠绕系统一般是机械式的,机械式缠绕系统在生产不同规格的制品时须频繁改变传动机械,生产效率低,操作极不方便。而且,由于机械调速的限制,缠绕系统的速比不能连续可调,影响了产品的工艺过程。当今,自动化控制系统已经在各行各业得到了广泛的应用和发展,采用先进的控制系统控制玻璃钢盐酸罐缠绕工艺已成为发展趋势。
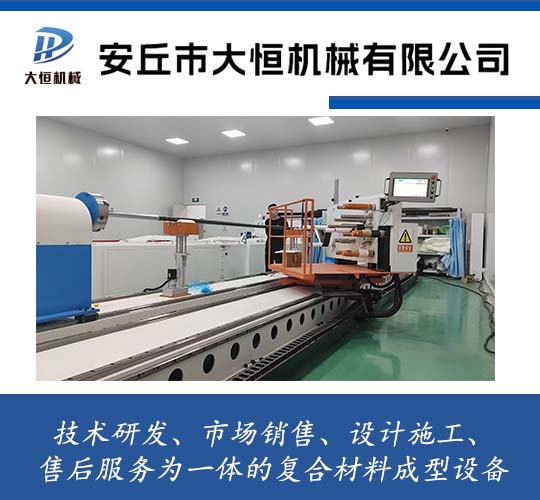
工作原理及功能要求玻璃钢盐酸罐缠绕机芯模绕自身轴线匀速转动,导丝头按一定的速比要求沿轴线方向往返运动。于是,芯模的筒身和封头上就实现了交叉缠绕。其缠绕角一般为45~70°,交叉缠绕的特点是每条纤维都对应于极孔圆周上的一个切点,相同方向邻近纱片之间相接而不相交,不同方向的纤维则相交。这样,当纤维均匀缠满芯模表面时可以构成双层。玻璃钢盐酸罐缠绕系统结构根据缠绕规律,芯模转速与导丝头的移动速度有严格的速比关系。导丝头往返一次,芯模要多转或少转一个角度(纱片宽度对应芯模圆的圆心角),两条标准线搭接完好,既不重叠也不离缝,均匀连续布满芯模表面。
更多信息请关注复合材料信息网http://www.cnfrp.com
